I think I will use the robot art idea for my final project. I worked with a friend in class to think through the idea more thoroughly. We worked on figuring out the programming for the robot. We played around with PicoBlock software and SciBorg to see if the idea would actually work. It seems promising!
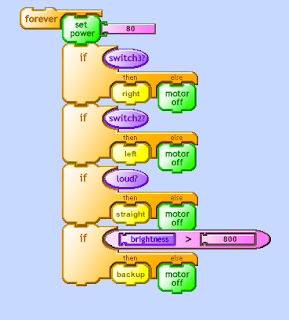 |
| Screen capture of potential program |
The image above is a screen capture of the PicoBlocks program code for the robot that creates art. PicoBlocks is fairly easy to use program. I will try to explain what this program does:
Note: In my posts I use cyborg and SciBorg interchangeably. However the correct term is SciBorg.





























