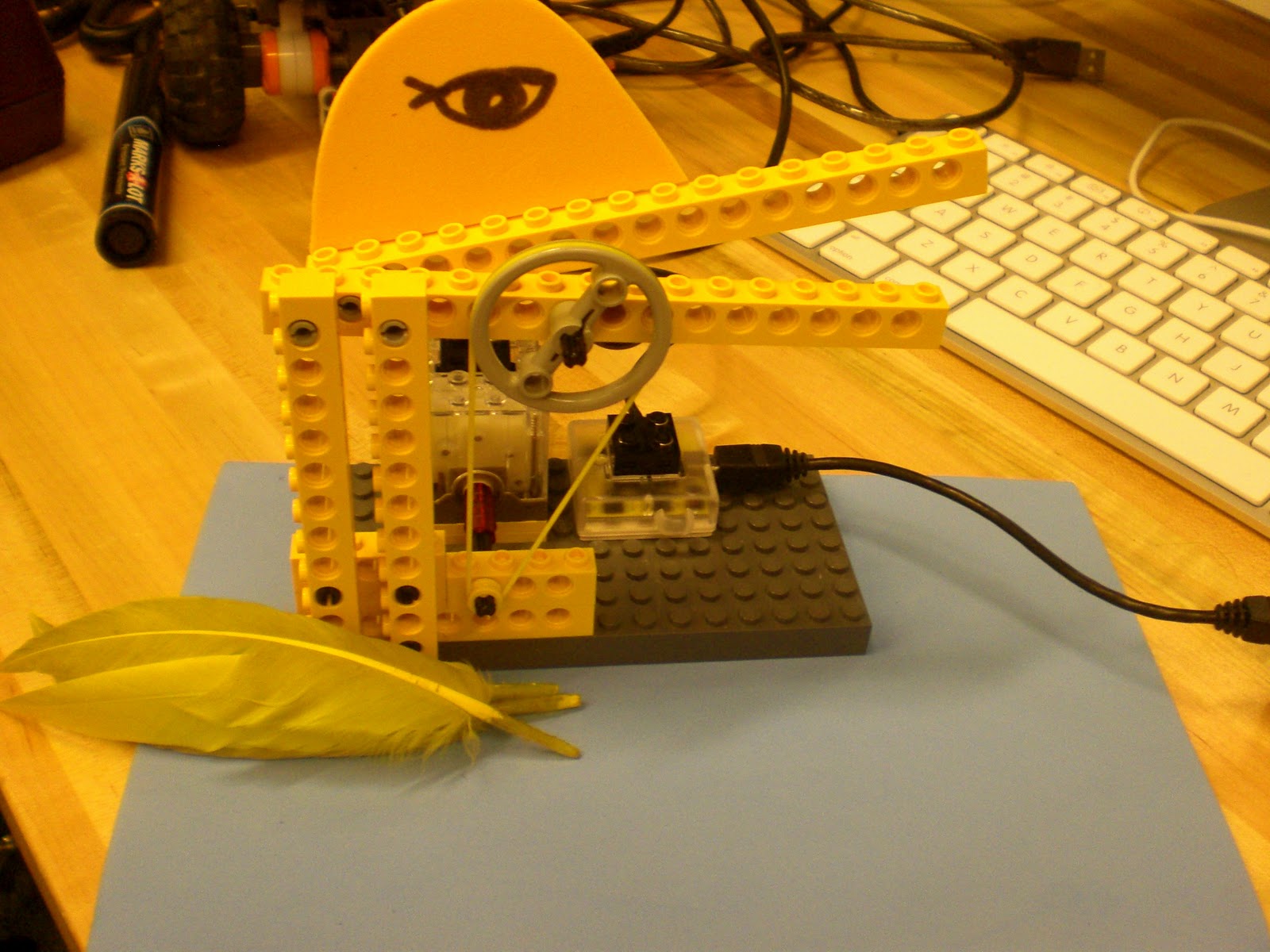
Since we got the robot's program to work last week, we spent today's class working on the appearance of the robot. We began thinking about its construction. During class there was a run to the craft store. My partner went to the craft store to get supplies and I stayed in the classroom and worked on designing picture frames in the
Adobe Illustrator computer program. Below is what the Illustrator document looks like. It is like a piece of paper. On this "piece of paper" there are three picture frames and one rectangle that has the working title of the robot, Robart (a combination of the words "robot" and "art") on it.
 |
| Supplies from the craft store |
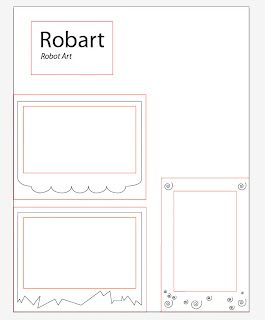 |
| Adobe Illustrator document |
Here are some more pictures of our workspace and of my partner working:
 |
| Working on the robot's outside |
 |
| Working |
 |
| Workspace |